1 Etat de l'art
1.3 La réalité virtuelle
1.3.2 Logiciel
Le logiciel doit gérer les différents périphériques et permettre la création, la modification et la manipulation du système mécanique. Nous allons ici aussi faire une présentation générale de l'état de l'art sans se retreindre à l'esquisse virtuelle. Nous commencerons par la définition de la structure générale d'un programme de réalité virtuelle (Fig. 33). Nous limiterons notre état de l'art en ne prenant en compte pour l'utilisateur que l'ouïe et le toucher en sortie du programme et le mouvements des mains en entrée.

Figure 33 : Structure générale d'un programme de réalité virtuelle
Cette structure n'est représentée que pour structurer cet état de l'art sur la partie logiciel, elle est constituée d'un ensemble de blocs de calcul et de modélisation. En réalité tous ces blocs sont reliés entre eux à différents niveaux, nous montrerons que le choix d'un modèle géométrique influe par exemple sur la visualisation. Une autre décomposition (Fig. 34) doit être effectuée afin de décrire à quoi correspond un système mécanique. Afin de rester le plus général possible, nous considèrerons qu'un système mécanique est un ensemble de pièces reliées entre elles par des contraintes (liaisons, positionnements, etc.) et ayant la possibilité de rentrer en collision.
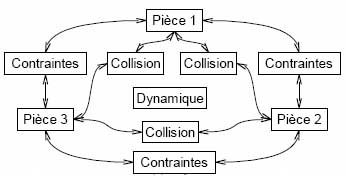
Figure 34 : Décomposition d'un système mécanique
Les pièces étant elles-mêmes constituées d'un ensemble d'entités géométriques reliées entre elles par des contraintes géométriques par exemple. On peut aussi utiliser le concept de squelette de pièce pour les modéliser, ce qui nous conduit à utiliser le concept d'entités géométriques intra-contact et celui d'entités géométriques inter-contact.
Nous allons maintenant présenter les différents composants logiciels.